
Previous Rovers
We keep detailed records of all of our previous rovers
DUG
Our fifth and most recent rover:
The Facts
- 6 PLA custom designed and 3D printed wheels that can elastically deform to 50% its diameter
- 6 degree-of-freedom robotic arm with differential joint to allow higher power transfer and carrying capacity of 10kg
- In-house designed PCB for PDB, able to manage the battery voltage of 22.2 Volts and 100 Amps of current draw
- 3D LIDAR and stereo camera implemented for autonomous navigation
- RTK GPS accurate within 20cm
- 2.4 GHz communication
- Maximum speed of 3 m/s


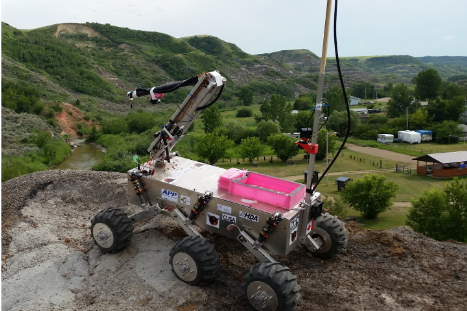
SAMI
SAMI is our fourth rover:
The Facts:
- Better Comms
- Easier driving
- Onboard spectrometer
- Autonomous Navigation
- Precise GPS
- New arm & end effector
- Status: Active
Waldo
Waldo was our third rover:
The Facts:
We made it to URC!
- Lighter than Sparky
- Fastest rover at CIRC – top speed of 4m/s
- Same arm – but better control
- Can still do push ups
- Status: Retired

Sparky
Sparky is our second rover. We began design in September 2016, and completed Sparky in June 2017. We entered Sparky in the 2017 Canadian International Rover Challenge, where the team won 2nd place.
The Facts:
- Mass: 48kg in competition configuration, 56kg fully loaded
- Power: 12V 60Ah Lithium Iron Phosphate Batteries
- Communications: 802.11g, standard 2.4GHz Wi-Fi
- Steepest slope climbed: 35 degrees, so far
- Top speed: 2.2 m/s
- Status: Active
H3
H3 was our first rover. Starting in September 2015, we just finished H3 in time for the United Kingdom University Rover Challenge in July 2016. Despite persistent communications issues, the team earned a 4th place finish.
The Facts:
- Mass: 37.2kg fully loaded
- Power: 12V 60Ah Lithium Iron Phosphate Batteries
- Communications: 802.11g, standard 2.4GHz Wi-Fi
- Top speed: 1.6 m/s
- Status: Retired


Want to get involved?
We’re always looking for new members!